This is related to Semi-Empirical Stellar Equations. I have had some questions easily answered, and others which are difficult or impossible to get the kind of accuracy I want.
I’m going to order what I’ve learned by the order I am planning to use these equations, marking equations loosely based on empirical data with an asterisk, and double asterisks for things I’ve completely made up to simplify calculation.
- Radius of Surface* (Rsurface):
5500km mean, 1550km standard deviation - Density* [based on common rock types] (Dplanet):
4.7g/cm3 mean, 0.55g/cm3 standard deviation - Volume [assumes a perfect sphere] (Vplanet):
4/3 * π * Rsurface3 - Mass (Mplanet):
Dplanet * Vplanet - Surface Gravity (gsurface):
6.673×10-11Nm2kg-2 * Mplanet / Rsurface2 - Surface Area [assumes a perfect sphere]:
4 * π * Rsurface2 - Atmospheric Pressure Reduction Rate** (Pr):
Pr [unit: none] = -0.00011701572 [unit: s2 / m2] * gsurface - Atmospheric Halving Height** (hd):
hd [unit: m-1] = ln(2) / Pr - Atmospheric Volume at Constant Pressure** (Vsim):
(4/3 * π * (Rsurface + hd)3 – Vplanet) * 2 - Surface Atmospheric Pressure (Psurface):
Psurface [unit: kPa] = ??? - Lowest Safe Orbital Height** (h0):
h0 [unit: m] = ln(1.4×10-11 / Psurface) / Pr - True Atmospheric Volume (Vatm):
4/3 * π * (Rsurface + h0)3 – Vplanet
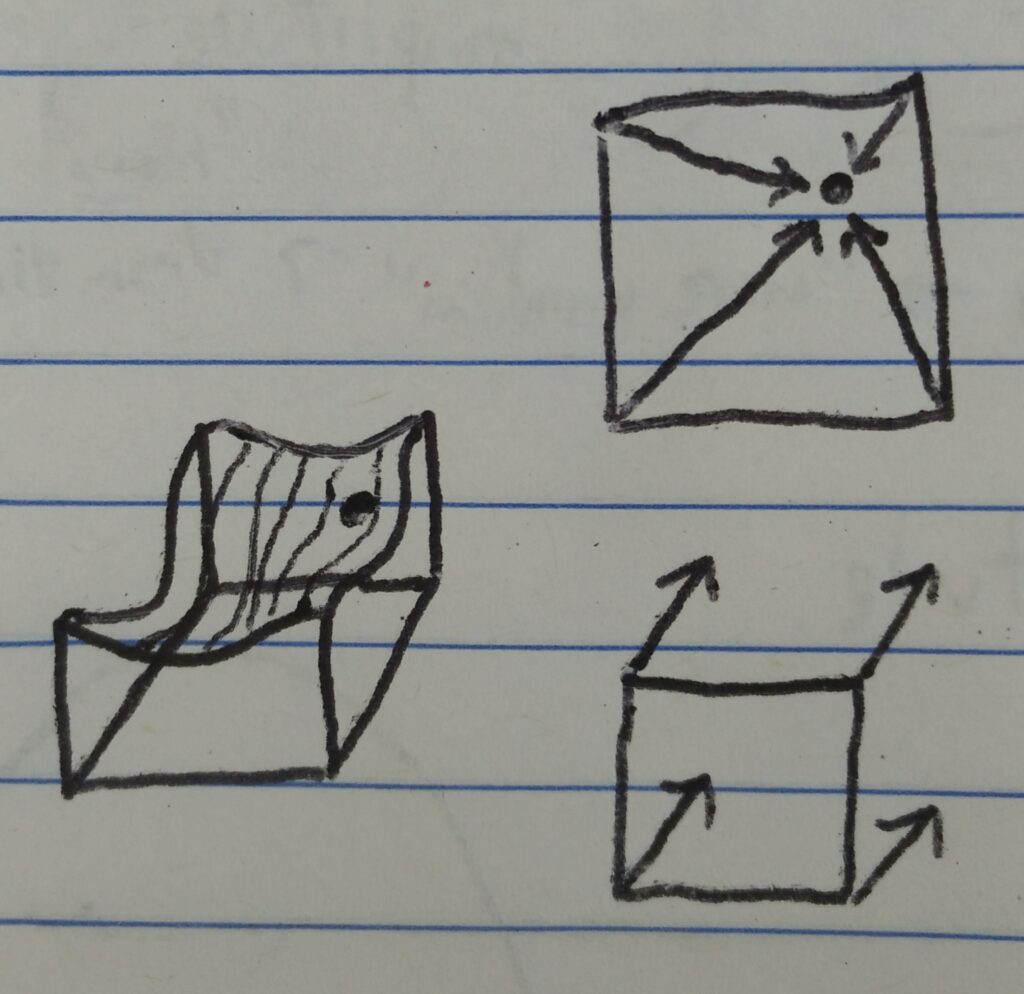
Vsim exists to support a simulation of an entire planet’s atmospheric contents using my simple fluid simulation mechanic. The magic constant used to calculated Pr is based on Earth’s atmosphere, it can be changed to set an exact “atmospheric height” while maintaining other properties of this simulation.
- Atmospheric Pressure at Altitude** (Paltitude):
Paltitude [unit: kPa] = Psurface * exp(Pr * maltitude) [Pr may be -Pr, I don’t remember]
This post is obviously incomplete, but it’s been a while since I posted anything here, and I felt like I should go ahead and share what I’ve been up to.